

Complex Number Forms
Complex Number Forms
The many ways of spelling a complex value. And why -1 × -1 = +1.

Last time I explained how — far from being imaginary — the complex numbers are necessary for math to work. We need them so equations like x²+4=0 have at least one value of x that makes the equation true.
I introduced the complex plane, the two-dimensional home of the complex numbers. Their inherent two-dimensional nature means complex numbers always are a bundle of two forever separate (real) numbers.
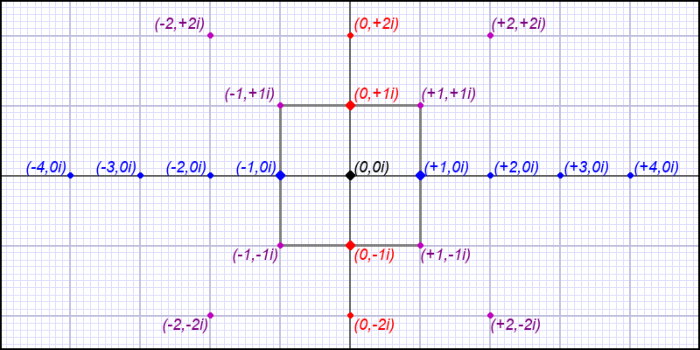
I left off with a parade of different ways of representing complex numbers:
All seven forms above could represent the same complex number. Look closely and notice that, with the apparent exception of the first one, all the rest involve two numbers. (Either a & b, or x & y, or r & θ.) The apparent exception, z, is a shorthand way to refer to a complex number as a whole.1
Representation
The second form, (a + bi), is what most probably learned on first contact with complex numbers. I’ll refer to it as the standard, basic, or canonical form. The a and b are real numbers — the two coordinates or coefficients of a complex number. The imaginary unit, i, appears with the second one to make bi an imaginary number. Because a and bi are from different axes, the addition implied by (a + bi) cannot be completed. Complex numbers are always bipartite.2
This two-dimensional nature leads to the third form, [x, yi] (or just [x, y] if we don’t need the reminder the second number is from the imaginary axis). This Cartesian form is for graphics — for converting the mathematical (a + bi) to an XY graphics system (or vice versa). The use of a comma instead of a plus sign highlightsthe coordinate nature of the pair.

The fourth form, (r, θ), is the polar representation of a complex number. In this scheme, rather than two orthogonal axes, the value is described by its distance from the origin (the [0,0] coordinate) and angle relative to the positive X axis.3 This form always uses a comma because it’s strictly a coordinate form (and adding an angle to a distance makes no sense).
It’s important to understand that even when expressed as (a+bi), or any other form, a complex number always has a distance — called its magnitude or absolute value — and an angle — called its argument or phase.
The fifth form, (r cos θ + ri sin θ), is a bridge between the polar and canonical forms. It has the shape of the canonical form, (a+bi), but uses the distance and angle values from the polar form. The values are evaluated through the cos and sin trigonometry functions to give the (a + bi) form.4 This is called the Euler form after Euler’s Formula:
The sixth form, the exponential form, looks a bit exotic but turns out to be another polar form. Note how it uses r and θ values. This is the other half of Euler’s Formula. (As an aside, the formula shows how the exponential form embodies both the sine and the cosine functions of the Euler form.)
The seventh and final form may seem the most exotic. All complex numbers have a 2×2 matrix representation. This advanced topic is worthy of its own post(s). For now, suffice to say the matrix is the 2D rotation matrix for angle θ multiplied by r:
Which connects to the polar representation, or one can instead plug in the a and b values from the canonical representation. Those familiar with matrices in linear algebra may find it interesting that:
The complex number matrix representation for 1 (1 + 0i) is the 2D identity matrix, and for our friend the number i, it’s the rotation matrix for a 90° rotation.5 As we’ll see, this is no coincidence.
Conversion Between Forms
Because these forms are either an XY view or an angle/distance view, converting between them requires a double dash trigonometry:6
Obviously, x=a and y=b, so converting between the (a + bi) form and [x, y] form is trivial. Also trivial, any of the forms with r and θ.
The Euler form, as mentioned, embodies this conversion from polar to canonical (a+b or x,y) form. Going from canonical form to polar form requires a pinch of Pythagoras and another dash of trig:
The first equation uses the Pythagorean theorem to get the distance of the point from the origin. The second equation uses the inverse tangent function (aka arctangent) to convert the “rise over run” (of y=b over x=a) to the angle.
As shown above, matrix representation derives directly from the Cartesian form.7 You can also plug r and θ into the 2D rotation matrix.
Rotation
That the matrix form is a 2D rotation matrix speaks to a key fact about the complex numbers. Recall from last time that we created the imaginary number axis by multiplying the real numbers by the imaginary unit, i — a seemingly impossible number we accepted to make math work. We then set this imaginary axis at right angles to the real axis because it seemed the obvious choice.
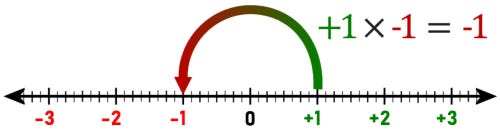
It turns out to be the necessary choice. To see why, take a step back to the real number line and consider the sort of operation we need to go from +1 to -1. How do we “turn around” on the number line? Why exactly does +1 × -1 = -1?
We created the negative numbers by multiplying the positive (natural) numbers by -1. In doing so, we generated a new part of the number line 180° from the positive axis. Using zero as the “hinge”, we swing the positive half around 180° to become the negative half.
+1 × -1 = -1 because multiplying by -1 rotates the +1 180°to -1.
Viewing multiplication by -1 as a (counterclockwise8) rotation also makes it easy to understand why -1 × -1 = +1 — something that can puzzle math students. If multiplying by -1 is rotating by 180°, then multiplying twice is rotating by 360°. Which rotates back to the positive axis.9

Now consider what we need for i=√-1. We know -1 is a 180° rotation and that i² = i × i = -1. We need two (equal!) rotations that get us to 180°. So, something that halfway rotates to -1 so doing it twice rotates all the way. Obviously, that’s a rotation of 90° — exactly where we put i and the imaginary axis.
So, think of i as a 90° rotation — exactly as indicated by its matrix form. In fact:
All multiplication with complex numbers is rotation.
An important caveat: multiplication isn’t just rotation. It’s also scaling — the result adds the angles but multiplys the distances. If both multiplicands have a distance of 1.0, the result does also (1.0 × 1.0 = 1.0), but otherwise it’s the product of the two.
This is easiest to understand using the polar form. Let’s have z₁ = (-3, 45°) and z₂ = (2, 90°). Then z₁ × z₂ = (-3×2, 45°+90°) = (-6, 135°). Because both distances were greater than one, the result is larger than either. (Note that, if distance is negative, it points in the opposite direction of angle.)
Utility of Forms
An obvious question is why so many forms? To a large extent they’re a natural consequence of the two-dimensional nature of complex numbers plus the presence of i — which changes how points interact from the Euclidean norm. It turns out that some problems are easier to solve using one form rather than another.
I’ll end with a simple example. We’ve solved √-1=i. Supposed we’re asked √i=? One way to solve this is:
Where you need to figure out what a and b are by reverse factoring (0 + i).

But with the exponental form:
No real figuring required. In this case, the exponential form answer is more elegant, but it really depends on the problem.
An Aside
The notion of multiplying a real number axis by i to get an imaginary copy of that axis — when the real axis is a coordinate axis in a 4D Euclidean space — is called a Wick rotation. It’s a math trick to convert between 4D Euclidean space and 4D Minkowski space (the domain of Einstein’s Special Relativity). It allows applying a known or easier solution from one space to a harder problem in the other space.
What I think is cool about a Wick rotation is that it accounts for the -+++ signature of Minkowski space. (And I do prefer the -+++ signature to the +--- signature.)
Another Aside
There’s an old joke about double-negatives in English, that a double-positive doesn’t reverse the meaning (except: yeah, right). But i² is exactly that because i is positive, and i × i = -1. So, a double-positive imaginary number makes a negative real number.
Until next time…
The key difference being that you can actually do math with the other forms.
Jargon: They have two degrees of freedom; regular numbers have only one.
A GPS location, with longitude, latitude, and elevation, is the polar coordinate system (r, θ, φ), where r is the elevation, and theta (θ) and phi (φ) are longitude and latitude.
This and the canonical form are occasionally written with a comma instead of the plus sign. Doing so emphasizes the coordinate nature while the plus sign emphasizes the numeric nature.
Note that the superscript 2 here means 2D, not “squared”.
See my post Easy Trigonometry for an overview if unfamiliar with basic trig.
Which is expected since both deal with Cartesian spaces.
Because you have to pick one and then be consistent.
For reasons I might get into another time, when analyzing multiplication, always begin at +1. When analyzing addition, always begin at 0. In short, it’s because those are the identity elements for those operations.